Arquitetura do sistema
Introdução
A arquitetura de um sistema refere-se à estrutura geral e à organização dos componentes que o compõem, assim como às interações e dependências entre esses componentes. Ela abrange a definição de elementos como hardware, software, interfaces e protocolos de comunicação, garantindo que todos esses elementos funcionem de maneira integrada e eficiente para atender aos requisitos do sistema. A arquitetura serve como um guia para o desenvolvimento, manutenção e evolução do sistema, proporcionando uma visão clara de suas funcionalidades e comportamentos esperados. Nesta seção, será detalhada a arquitetura final do sistema.
Arquitetura do Sistema
A arquitetura do sistema foi dividida em quatro partes principais: robô, backend, frontend e docker. A seguir, cada uma dessas partes será detalhada.
Figura da arquitetura da solução
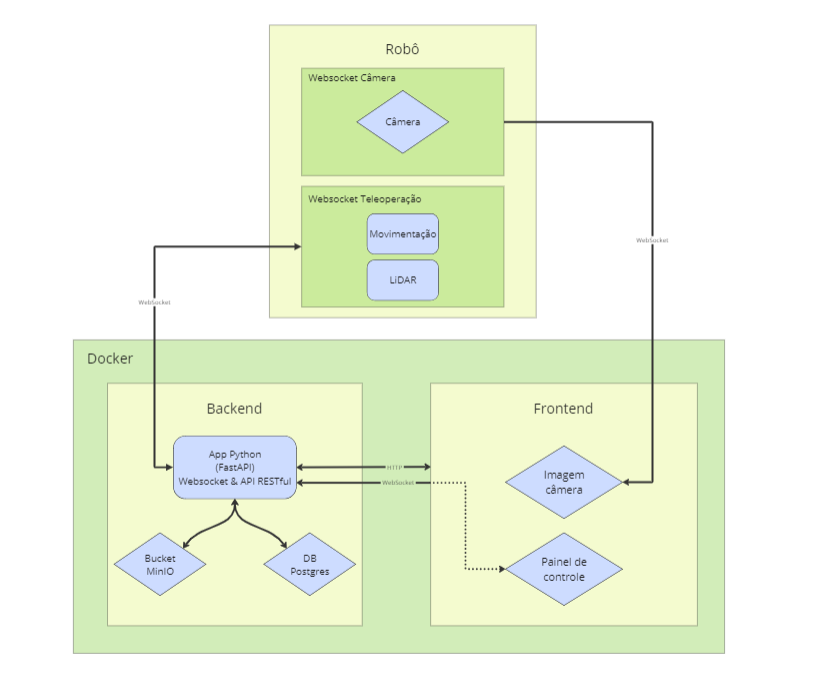
Fonte: Elaborado por Cannabot
Robô
O robô é um Turtlebot 3, equipado com uma Raspberry Pi 4, que é responsável por controlar o robô e processar as imagens capturadas pela câmera. No robô, há dois websockets em operação: um responsável por enviar as imagens capturadas pela câmera para o frontend e outro por receber os comandos de movimentação e enviar os dados do LiDAR para o backend.
Backend
Nosso backend é desenvolvido em Python, utilizando o framework FastAPI. Ele é constituído tanto por um websocket quanto por uma API REST. O websocket é responsável por receber os dados do robô e do LiDAR, enviar os comandos de movimentação para o robô, e enviar e receber comandos do frontend. A API REST é responsável por armazenar dados no banco de dados e fornecer esses dados para o frontend.
Além disso, nosso banco de dados é PostgreSQL, que armazena dados do usuário, dados do robô e logs de execução. Também utilizamos um bucket MinIO para armazenar as imagens capturadas pelo robô.
Frontend
O frontend é desenvolvido em React, junto com Vite. Ele é responsável por enviar os comandos de movimentação para o robô, exibir avisos de obstáculos, exibir as imagens capturadas pelo robô e exibir os dados do banco de dados. As imagens capturadas pelo robô são exibidas em tempo real, através do websocket que recebe as imagens diretamente do robô.
Docker
O Docker é responsável por rodar o backend, frontend, banco de dados e MinIO. O Docker Compose orquestra os containers, permitindo que o projeto seja facilmente executado em qualquer máquina que tenha o Docker instalado.
Considerações Finais
A arquitetura do sistema descrita integra de maneira eficiente e coordenada todos os componentes essenciais, proporcionando uma base robusta para o desenvolvimento, manutenção e evolução do projeto. Com a separação clara entre as funcionalidades do robô, backend, frontend e a utilização de Docker para orquestração, garantimos que cada parte do sistema possa ser desenvolvida e gerenciada de forma independente, mas ainda assim funcionando harmoniosamente como um todo.
Ao adotar tecnologias como FastAPI para o backend, React para o frontend e Docker para a conteinerização, asseguramos não apenas a escalabilidade e a flexibilidade do sistema, mas também uma facilidade de implementação e replicação do ambiente de desenvolvimento. A decisão de manter as funcionalidades relacionadas ao ROS confinadas ao robô permitiu maior compatibilidade com diferentes sistemas operacionais, ampliando a acessibilidade do projeto.
Essa abordagem modular e bem estruturada permite que futuros aprimoramentos e expansões sejam realizados de maneira ordenada e eficiente, garantindo que o sistema permaneça alinhado com os requisitos e expectativas dos usuários. Assim, a arquitetura apresentada não só atende às necessidades atuais, mas também está preparada para suportar o crescimento e a evolução contínua do projeto.